Developer Blogs



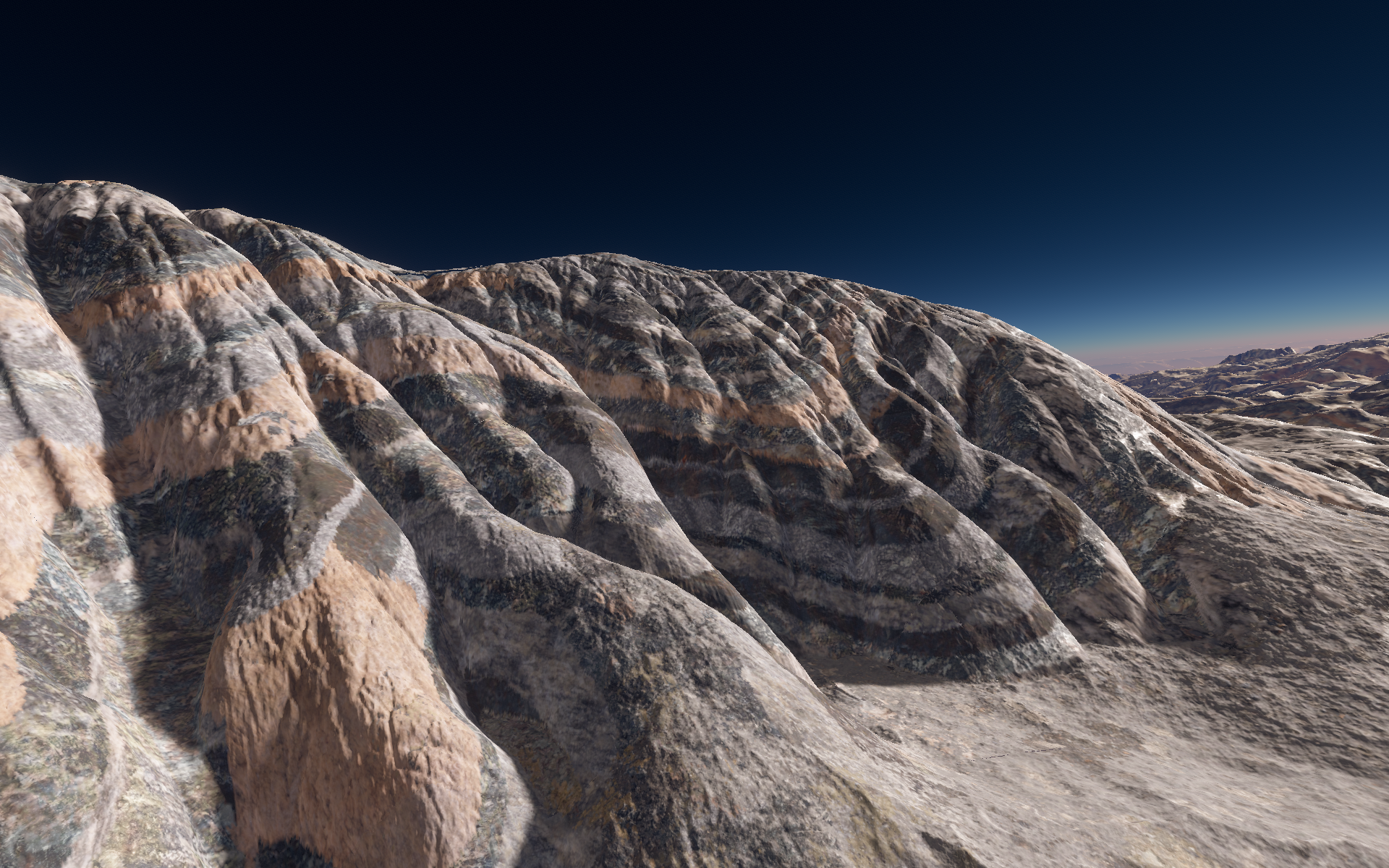
![General structure and design of the Acclimate Engine [Part 3]](https://uploads.gamedev.net/profile/photo-thumb-170374.png)
Forum Discussion






Game Developer News

Khronos Releases OpenXR 1.1 to Further Streamline Cross-Platform XR Development
April 15, 2024 01:47 PM
zephyr3d: Rendering engine for web browsers that supports WebGL and WebGPU.
March 21, 2024 10:16 AM

Gaming rewards platform Forge announces new strategic relationships
February 26, 2024 11:44 PM
Feature Tutorials



Latest GameDev Projects
Informal tutorial/blog series specifically around what I've learned over the years working with unr…
Explore and discover the mysteries aboard an interstellar freighter in Omega Warp, a 2D sci-fi acti…
Loading...
Finding the llamas...
You must login to follow content. Don't have an account? Sign up!
Advertisement
Top Members





Advertisement
Popular Blogs
Stompy's Gamedev Journal
686 entries

Graphics Engine Development
11 entries
Journal of Damon501
12 entries
The Pixel Ocean
8 entries

A4L
24 entries

