
February 02, 2013

About two months ago, I started writing a 2D game. Given that my previous work was on a 3d deformable terrain, I figured a nice 2D game would be a nice change of pace, and give me less hassle. I was right...mostly.
Character animation in 3d is not a simple task. There's some great software out there…
Character animation in 3d is not a simple task. There's some great software out there…
January 31, 2013
I'm posting this as an excercise/lesson, hopefully its useful to someone.
Eight years after I started learning c++, I was still caught off guard by this.
Basically I had code like this: (ignore the LOG_DEBUG - that was just put there when I was testing this)
Eight years after I started learning c++, I was still caught off guard by this.
Basically I had code like this: (ignore the LOG_DEBUG - that was just put there when I was testing this)
struct ViewMember{ ViewMember(Widget *wid,…
November 21, 2011
I've been working on water, slowly progressing forward. To those who might wonder, keeping track of, generating storing and updating water when you're dealing with a 5km planetoid (our current test planet) isn't quite straight forward. This is sort of a backpost, since i already had basic water in …
October 29, 2011
Here's a video of the work we've done on water, grass and detail textures. There's also a new build with these featuers on the blog: http://blog.milchopenchev.com
We haven't really had time to post any detailed description on the technicals behind the water or detail maps, but hopefully soon we will…
We haven't really had time to post any detailed description on the technicals behind the water or detail maps, but hopefully soon we will…
October 10, 2011
[size=2]
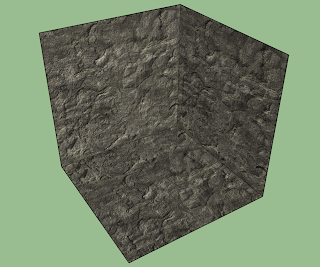
[size="2"]How we handled doing normal maps when also doing tri-planar texturing.
[size="2"][size=2]Note: this is a duplicate post from our project blog: http://blog.milchopenchev.com - the formatting may be a bit off, sorry.
[size="2"][size=2][size=2]For our texturing, we had no choice but to…
[size="2"]How we handled doing normal maps when also doing tri-planar texturing.
[size="2"][size=2]Note: this is a duplicate post from our project blog: http://blog.milchopenchev.com - the formatting may be a bit off, sorry.
[size="2"][size=2][size=2]For our texturing, we had no choice but to…
September 24, 2011
The Procedural Editable Terrain project is just what it sounds like - a project to make an engine for terrain that is both procedurally generated, and allows for editing functionliaty (lowering, raising etc.)
The project evolved from my previous project for simply procedural terrain. One other perso…
The project evolved from my previous project for simply procedural terrain. One other perso…
September 09, 2011
Well, it's been a long time since I've posted here.
The terrain project I've been working on has resumed, under the name PrEdiTer - Procedural Editable Terrain.
It's currently new blog is here: http://blog.milchopenchev.com
---
The terrain project I've been working on has resumed, under the name PrEdiTer - Procedural Editable Terrain.
It's currently new blog is here: http://blog.milchopenchev.com
---
February 17, 2011
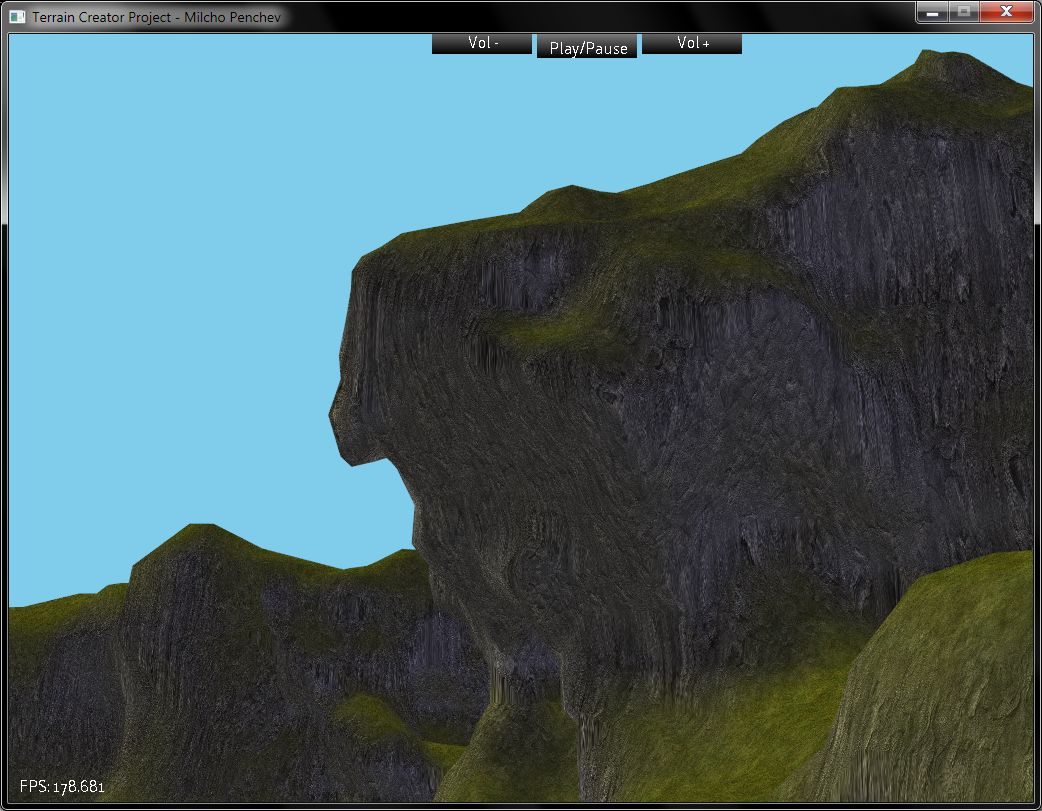
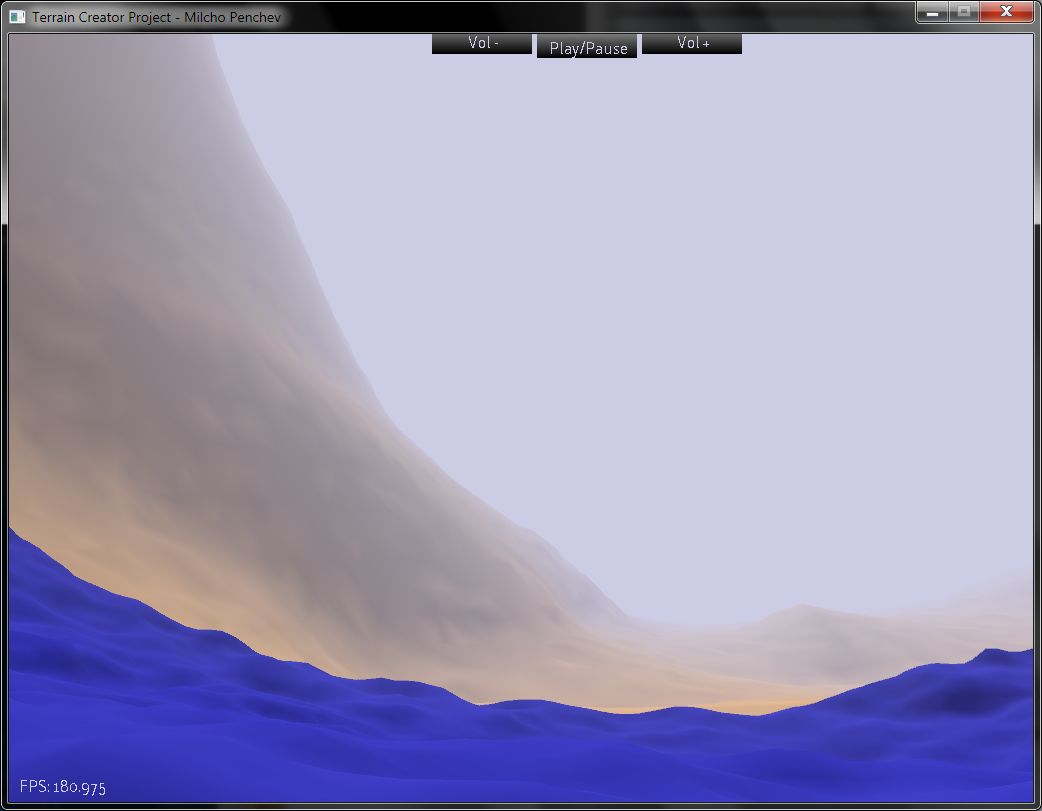
The terrain is finally starting to look like..well.. terrain. With normal-based texture coordinate assignment and 3d texturing, the results are promising. The updated version is also up on my site, available for download, and in fact, I encourage you to try it and would appreciate any feedback.
The …
The …
February 15, 2011
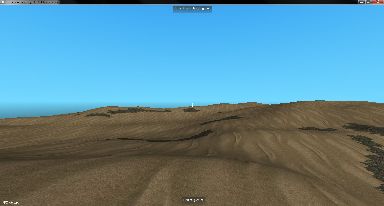
I've completed the start of the procedural terrain. You can download the test on my site here. I know not a lot of people read this, but if you are one of the few, and you decide to download it, I'd appreciate some feedback on how well it runs.
If you do download it, you can move with wasd, and hold…
If you do download it, you can move with wasd, and hold…
February 09, 2011
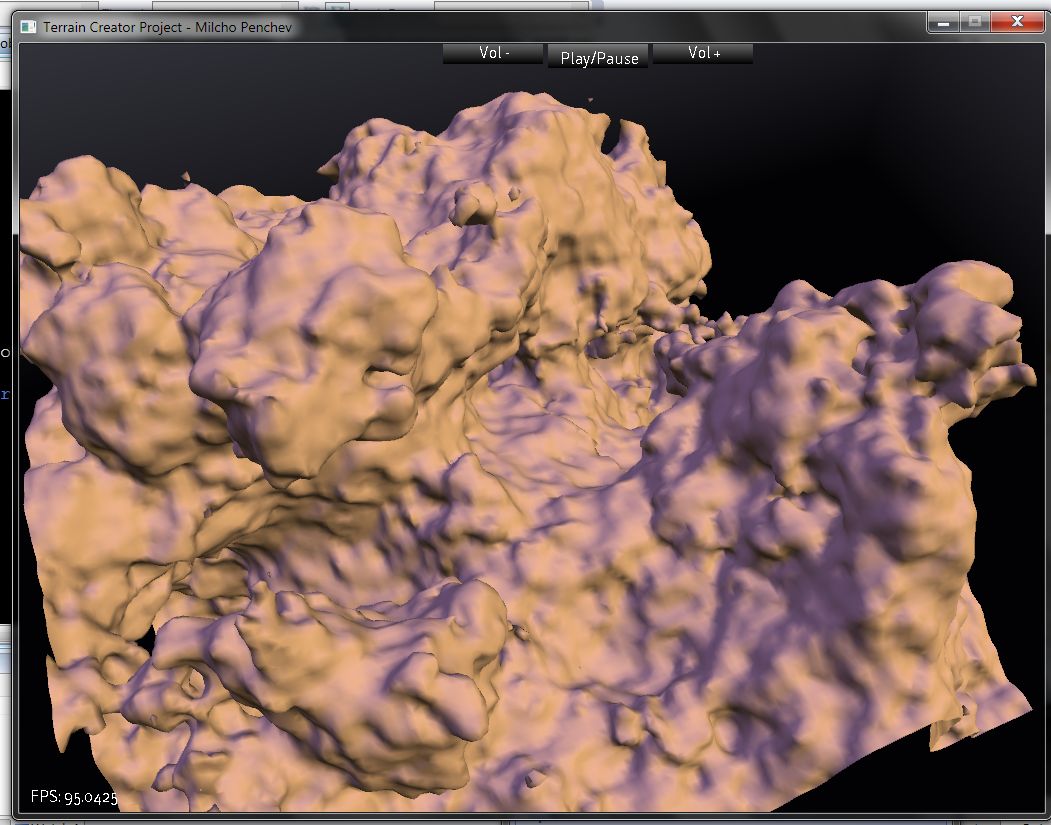
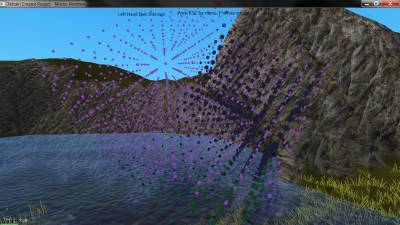
Today, in a mini-update, some screenshots of terrain generated by a combination of the Marching Cubes algorithm and a perlin-noise density function.
The images below have 2 parts: a small grid in a 64x64x64 meter cube, sampled at 2 samples per meter, and a large grid in a 512x512x512 cube sampled a…
The images below have 2 parts: a small grid in a 64x64x64 meter cube, sampled at 2 samples per meter, and a large grid in a 512x512x512 cube sampled a…
February 08, 2011
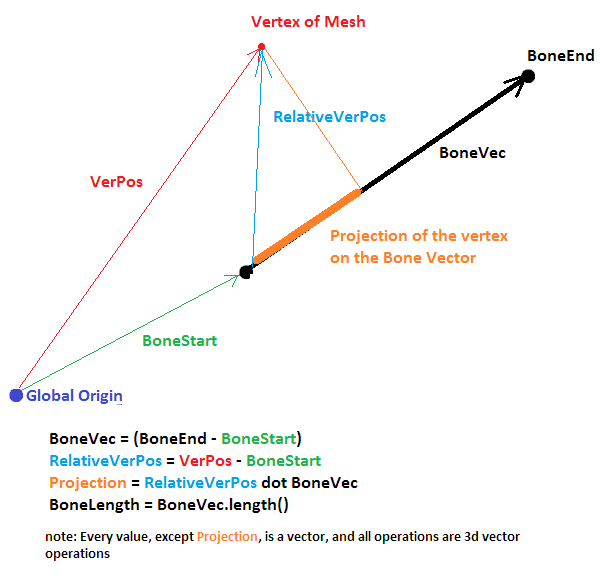
With skeleton animation now functional, animating a model was the next step. That is, however, no trivial step.
My skeleton's design gave me an easy way to move a point "with" a given bone. Each bone has it's own Axes, which is always aligned with the bone. For the purpose of the skeleton this was c…
My skeleton's design gave me an easy way to move a point "with" a given bone. Each bone has it's own Axes, which is always aligned with the bone. For the purpose of the skeleton this was c…
February 08, 2011
So, with the bone system in place, and working well, it was time to add motion to it.
First, the animation file was going to be specific to this skeleton - if another skeleton was build, in terms of bone structure, it would have to use a different animation file.
There are actually 21 bones in my ske…
First, the animation file was going to be specific to this skeleton - if another skeleton was build, in terms of bone structure, it would have to use a different animation file.
There are actually 21 bones in my ske…
February 08, 2011

Ahem, so my first entry on what's essentially going to be my long and tedious work towards a small custom game engine.
The first few entries are just going to be me, playing catchup on what I've done so far.
The first thing I've decided to try to do, is animate a human character. For this purpose I c…
The first few entries are just going to be me, playing catchup on what I've done so far.
The first thing I've decided to try to do, is animate a human character. For this purpose I c…
Advertisement
Popular Blogs





Advertisement