
well i m unable to decided proper way to handle this may be you guyz could help me out. here is the prob,
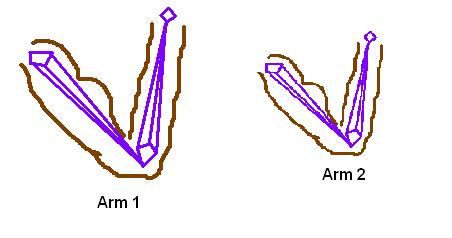
i have two skeletons say Arm 1 and Arm 2 as seen in fig.
Now i have saved a transformation for Arm1 skeleton [i.e. an animation sequence for Arm1]
( transformation means a matrix or a set[ rotation , scale, translation] )
now from the fig it is clear that the original size of the bones are different in both cases,
so if we directly use the transformations of Arm1 to Arm2 we would get large displacements(linear & angular) and change of bone lengths also
which is totally unacceptable since these bones are skinned and hence these weird side effects will affect the mesh's look
[i know only rotation transformation may not create such effects but when transformation contains rotation along with scale and/or translation it generates those results ]
..... i checked this in 3D Max .
So now, how should i map the transformation from Arm1 to Arm2 without getting those weird side effects....
...
An Answer comes to my mind Relative Transformation Mapping[RTM]
...
In layman's term i need a system that can take
1] given set of transformation
2] other bone system.....Same No Of Bones.....<Should this be required ?>
and outputs new transformation without those weird side effects.
Its like Suppose there are Time Lines AB and CD
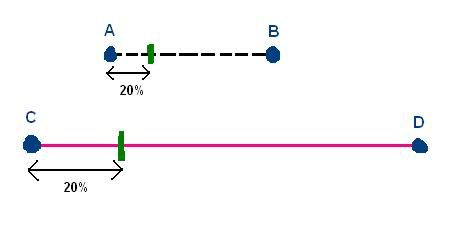
Now if Apply transformation from CD to AB using RTM it will be simple linear interpolation between
endpoints A and B based on a delta retrieved from transformation on CD.
But the problem in our case is different because we don't know the end points of the transformation
in Arm2[initial transformation i.e current base pose is only known]
Hence we cant use simple linear or spherical interpolation.
.... Can u Guyz Suggest to make this RTM System work ?



