
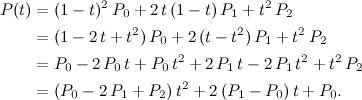
I have been working with Cubic and Quadratic bezier curves for the past week, and one thing that I am still not sure about is how to get the polynomial coefficients from the control points. For example, a cubic bezier has the formula A*t^3 + B*t^2 + C*t + D and a quadratic one has A*t^2 + B*t + C. The cubic bezier is defined by the end points P0 and P3, and the control points P1 and P2. The quadratic one is just P0, P1 and P2. http://floris.briolas.nl/floris/2009/10/bounding-box-of-cubic-bezier/ says that the coefficients for the cubic bezier can be calculated like:
m_DX = m_P0.x;
m_CX = 3.0f * ( m_P1.x - m_P0.x );
m_BX = ( 3.0f * m_P2.x ) - ( 6.0f * m_P1.x ) + ( 3.0f * m_P0.x );
m_AX = m_P3.x - ( 3.0f * m_P2.x ) + ( 3.0f * m_P1.x ) - m_P0.x;
These coefficients can be plugged into the formula A*t^3 + B*t^2 + C*t + D and it works, so they seem to be okay. I am not sure how those coefficients were derived though. Can anyone explain this to me? Also, I would need to calculate the same coefficients for a quadratic bezier.
Thanks!

")
 for all i from 0 to n-1.
for all i from 0 to n-1.


