Hello
I am a bit noobish with this but am trying to work out how to calculate the correct velocity of an object to have for an approaching corner.
So the object has the following stats:
acceleration : 3 units/s (this is also for slowing down)
max speed : 15
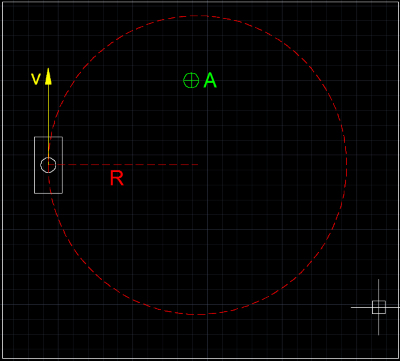
turn speed : 45 degs/s
I want to find the correct velocity to approach a corner so that, it will take the corner without over steering. If the object literally has to stop entirely and rotate thats also fine (kind've like a tank).
I don't know the right formula to do this. Most google results include complicated aspects like drag and friction, mass etc and stuff that is too complex for my needs and then i don't know how to simplify it for my own needs.
If it helps, i calculate the angle in degrees not radians (since i use Unity's Vector3.Angle).
Hope some one can help, don't need code, just the math logic for it i can translate to code from that.