I can see the edge algorithm is very much like the face algorithm.
The Face algorithm finds the largest separation and the edge algorithm seems to do the same.
I have a few problems with the example I have attached.
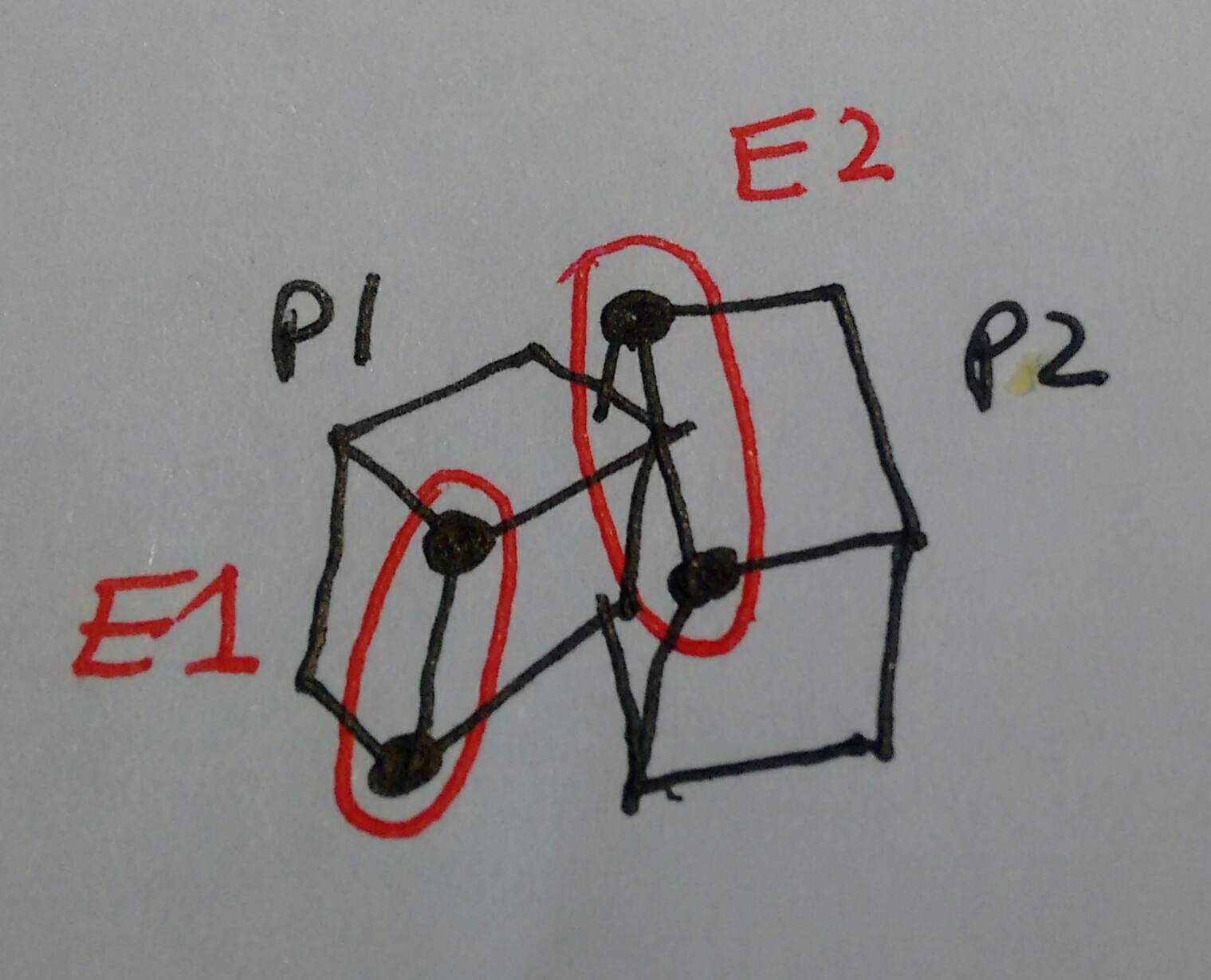
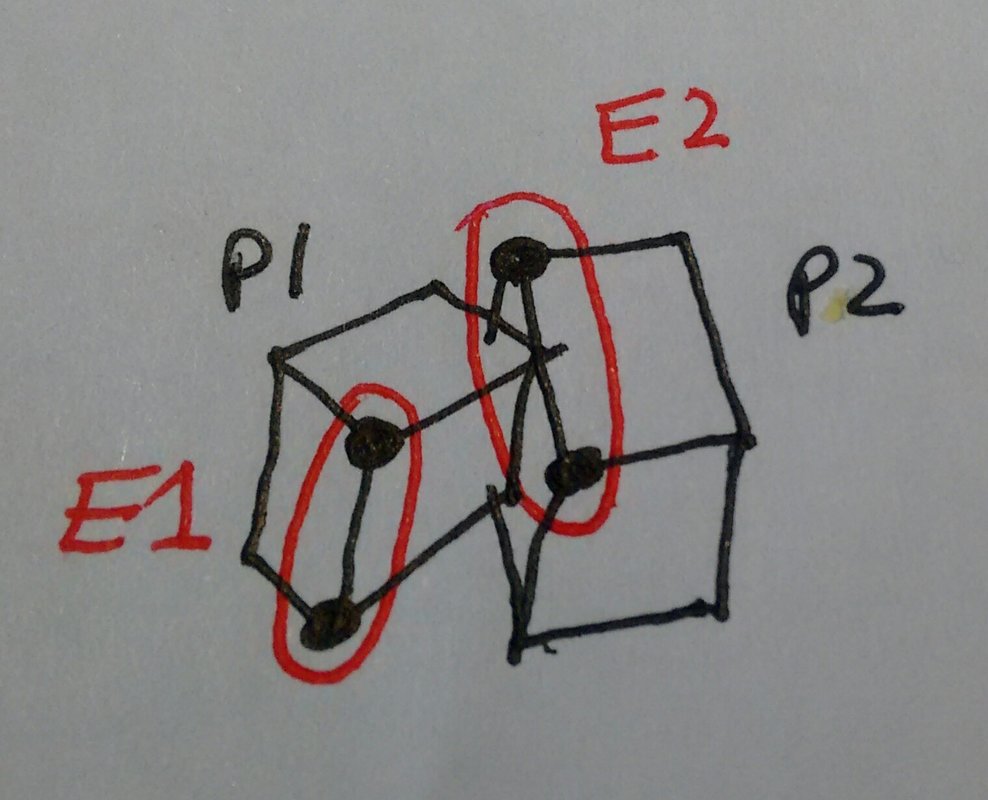
Polyhedron P1 is rotated 45 degrees around the Y axis. I get the cross product between edges E1 & E2: this gives either the +X or -X axis.
Problem 1: I can't determine the direction of the axis because the dot product will always give zero
Problem 2: If I can determine the direction of the X-axis there is a separation between E1 & E2 & the algorithm will fail
Maybe I have misunderstood?
Thanks
Reject the basic asumption of civialisation especially the importance of material possessions