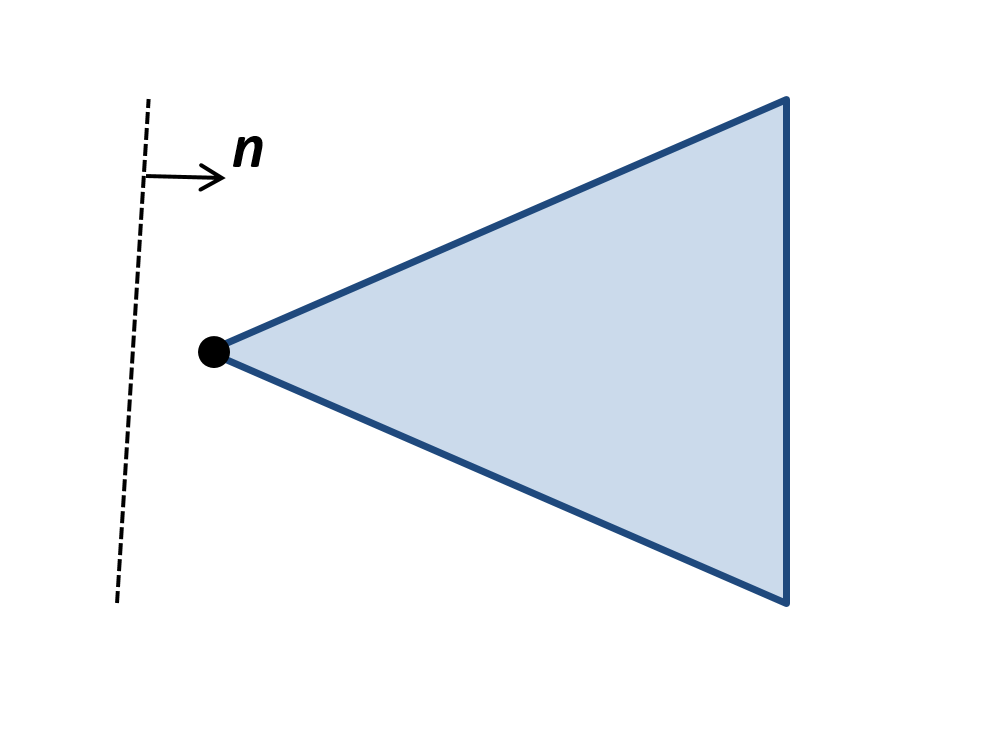
Hello. I'm trying to come up with a simple method to cull an AABB against frustum planes, and I have something here, but I'm wondering if the logic is flawed. I am not currently able to test it, and have been in these situations before where I think I have a solid idea and then later realize it didn't make much sense. Can anyone confirm or deny this will work? The idea is pretty simple. Find the corner of the AABB that is farthest into the direction of the plane normal and test only that single point. If the point is in front of the plane (inside the camera frustum), then the AABB cannot be culled by that frustum plane and is still considered visible. Function to test against a single plane:
bool TestPlaneAABB(const VEC3 &eye,const VEC3 &normal,const AABB &box) const
{
// prepare most-positive vector offset
// + this will be the (offset of the) corner of the AABB that is farthest into the direction of the plane normal
VEC3 most_positive_offset(
( normal.x < 0 ? box.Left : box.Right ) - eye.x, // choose x-side that is most positive relative to plane normal.x
( normal.y < 0 ? box.Bottom : box.Top ) - eye.y, // choose y-side that is most positive relative to plane normal.y
( normal.z < 0 ? box.Back : box.Front ) - eye.z ); // choose z-side that is most positive relative to plane normal.z
// now simply return the result based on which side (of the plane) the most positive corner is on
// + if this returns true, the most positive point is on the positive side and the box is still partially visible
// + if it returns false, the most positive point is BEHIND the plane, meaning the entire box is behind the plane
return Dot3( normal, most_positive_offset ) >= 0;
}So I would just execute this function once for each frustum plane to determine if the box is hidden or visible. I tried to do some research on AABB frustum tests, but didn't find much that helped. If there is a simpler or easier way to do this, I really appreciate any insights.
Thanks!