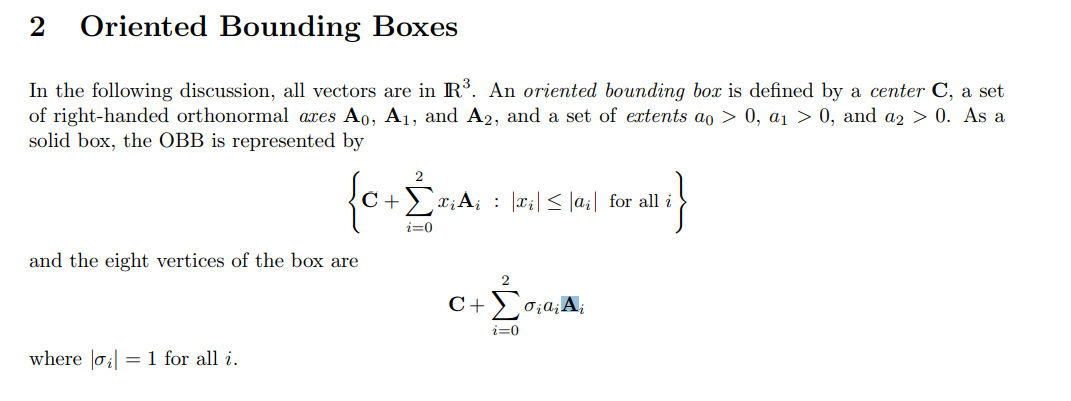
I'm trying to work out the implementation of a separating axis theorem for oriented bounding boxes based on a paper by David Eberly et al.. And it's got some uses of the sigma notation which I don't quite understand. It's probably very rudimentary but it's used throughout the paper and I feel like understanding this well will make it much easier to read the rest of it. I will post a picture of the section I'm having difficulty with (please scroll down to the bottom of the post) and my questions will be based on it, so please take a look at it.
What I'm not seeing is how will that formula get me 8 vertices of a box if there are only 2 iterations on top of the sigma?
For example if I solve the iterations it comes out as this
center + xExtent*xAxis + yExtent*yAxis + zExtent*zAxisDoesn't that only give me one point?
Don't I have to repeat the whole thing 8 times with different signs to get all 8 points?
Also what is the |σi| variable in there? The paper says
Quotewhere |σi | = 1 for all i.
What is the purpose of including that if it's always 1.
Anyways, I feel like I'm missing some detail or just not understanding the proper way a sigma notation is used, this is how I would write the code for that equation
vector center;
float sigmatotal = 0;
for(int i = 0; i <= 2; i++)
sigmatotal += gamma[i]*extent[i]*axis[i];
center += sigmatotal;