I thought a little more about the problem of losing relevant data with RDP. I'll discuss the speed issue here, but I think the same concept can be applied to other parameters, like pressure.
The following is speculative and off the top of my head, and there may be errors (conceptual or otherwise).
Each segment in the original curve has a speed, which can be computed as (p0 and p1 are the endpoints of the segment):
distance(p0, p1) / (p1.absolute_time - p0.absolute_time)
Every point but the first and last can then be given a 'speed delta' value that is the absolute value of the difference between the speeds for the segments preceding and following the point. The greater this value, the more 'important' this point is (irrespective of other factors) in terms of capturing information about the original drawing speed.
Here's a concrete example:
speed delta = abs(5-5) = 0
|
v
*------------*------------*
speed=5 speed=5
In this case you could remove the middle point without losing any information regarding speed. However, in this case:
speed delta = abs(9-1) = 8
|
v
*------------*------------*
speed=1 speed=9
Losing the middle point would lose valuable information, turning a period of slow movement followed by a period of quick movement into a single, uniform average speed. This seems to be the problem you're describing, where your RDP implementation is losing this kind of information.
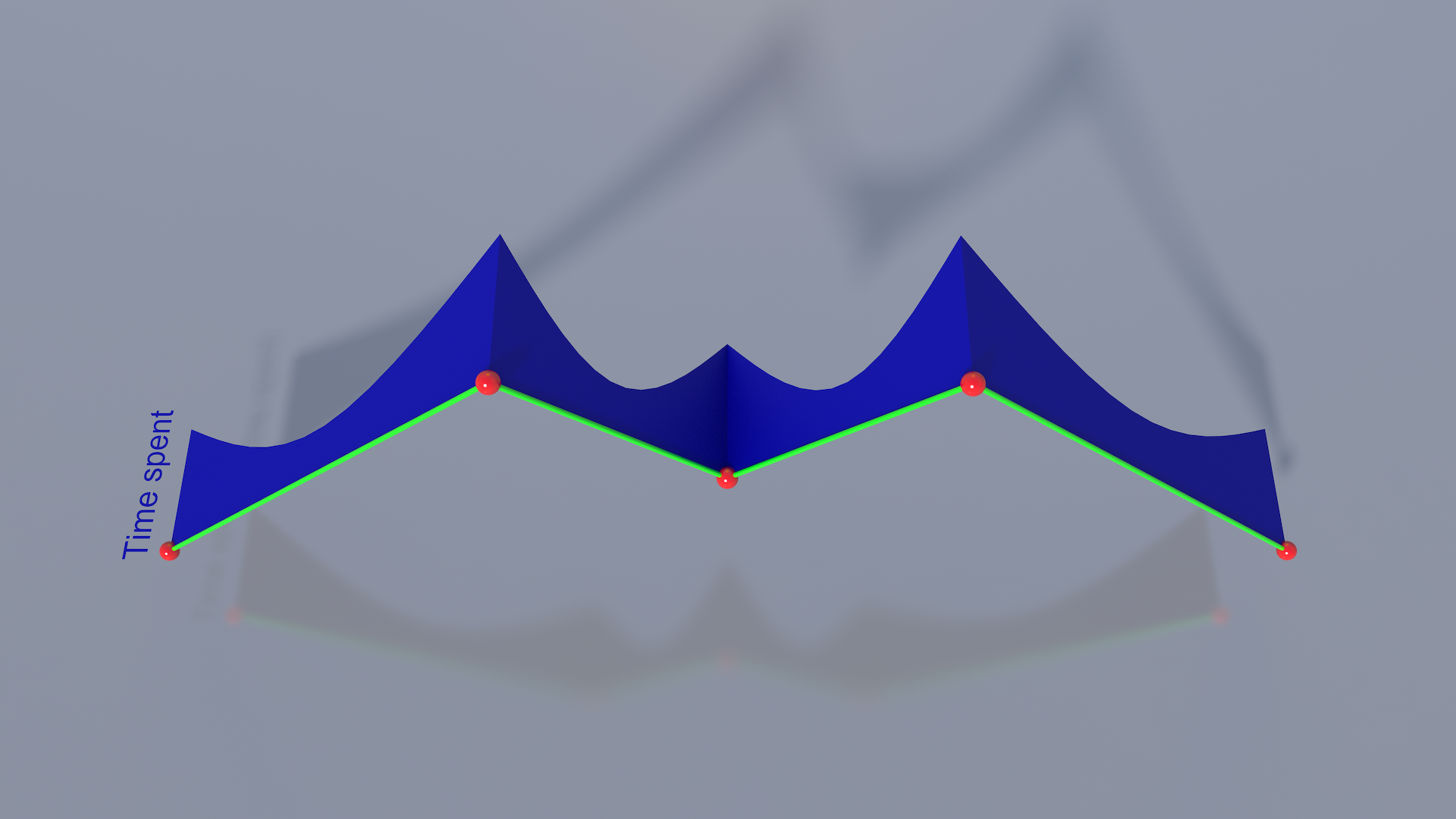
What I'm wondering is if the dimension in which the RDP algorithm is run could be expanded to include other parameters. So that we don't have to think beyond 3-d, let's just stick to one extra parameter, speed. Imagine the geometric curve lying in the xy plane. Now, map the speed deltas to the z axis in 3-d, so you have a 3-d curve. If RDP is then run in 3-d, incorporating this new information, the speed deltas can help prevent points that represent important speed information from being lost.
One factor here is scale. If the speed deltas are much smaller or larger in general than the geometric deltas, that could throw things off, giving the speed deltas too little or too much weight. A possible solution would be to include a scaling/weighting factor for the speed deltas (and any other additional parameters you wish to include) so that the contribution is appropriately proportional.
In summary, although I'm not sure I've worked out all the details here, I think it still may be possible to get the results you want by modifying the smoothing algorithm(s) (and given the possible expense of post-processing, that may be the only practical option).