It is said that OpenGL uses column-major 4x4 matrices (http://www.songho.ca.../gl_matrix.html). Does this mean that the translations are at the right or at the bottom like in Xna?
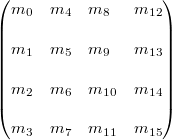 Opengl: Column-major matrix
Opengl: Column-major matrix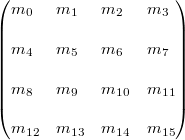 Row-major matrix
Row-major matrixThanks
 Opengl: Column-major matrixRow-major matrix
Opengl: Column-major matrixRow-major matrix i just checked
i just checked
You can put the translation along the last row or column, depending on your conventions. Note the distinction between row/column majorness and row/column vectors. Dx and GL's matrix uploading functions expect the matrices to be stored in a given majorness so as long as you comply, you can use any combination of row/column vectors stored in row/column major (although both APIs will transpose your matrices for you if you specify it, at least GL does to my knowledge).
translations are at m12,13,14i just checked
you can pass them with glUniform* with false in the transpose parameter
btw. if you want to make your own little matrix lib, i heartily recommend it
lots of little mini-functions in the class that can do alot less flops than constantly multiplying entire matrices together
eg. translateXZ, translateXYZ, and so on.
// left vector
m_Element[0] = cy;
m_Element[1] = sx * sy;
m_Element[2] = -cx * sy;
m_element[3] = 0.0f; // w1
// up vector
m_Element[4] = 0.0f;
m_Element[5] = cx;
m_Element[6] = sx;
m_element[7] = 0.0f; // w2
// forward vector
m_Element[ 8] = sy;
m_Element[ 9] = -sx * cy;
m_Element[10] = cx * cy;
m_element[11] = 0.0f; // w3
// translation
m_element[12] = 0.0f; // tx
m_element[13] = 0.0f; // ty
m_element[14] = 0.0f; // tz
m_element[15] = 1.0f; // w4




