How to calculate rotation matrix based on cone direction? I have a spotlight defined like this:
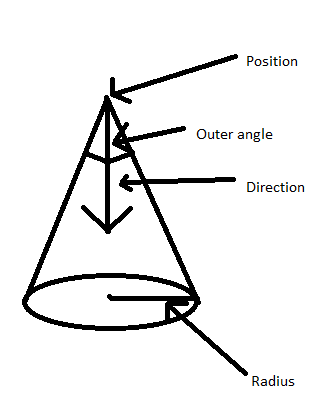
I'm creating vertices array for a cone to draw spot light shape and then I'm creating a buffer (line loop mode):
private static float[] createConeVerticesArray(float radius,
float height,
int segments)
{
Array<Float> verticesArray = new Array<>();
float angle = 2 * MathUtils.PI / segments;
float cos = MathUtils.cos(angle);
float sin = MathUtils.sin(angle);
float cx = radius, cy = 0;
for(int i = 0; i < segments; i++)
{
verticesArray.add(cx);
verticesArray.add(cy);
verticesArray.add(height);
verticesArray.add(0f);
verticesArray.add(0f);
verticesArray.add(0f);
verticesArray.add(cx);
verticesArray.add(cy);
verticesArray.add(height);
float temp = cx;
cx = cos * cx - sin * cy;
cy = sin * temp + cos * cy;
verticesArray.add(cx);
verticesArray.add(cy);
verticesArray.add(height);
}
verticesArray.add(cx);
verticesArray.add(cy);
verticesArray.add(height);
cx = radius;
cy = 0;
verticesArray.add(cx);
verticesArray.add(cy);
verticesArray.add(height);
float[] result = new float[verticesArray.size];
for(int i = 0; i < verticesArray.size; i++)
{
result[i] = verticesArray.get(i);
}
return result;
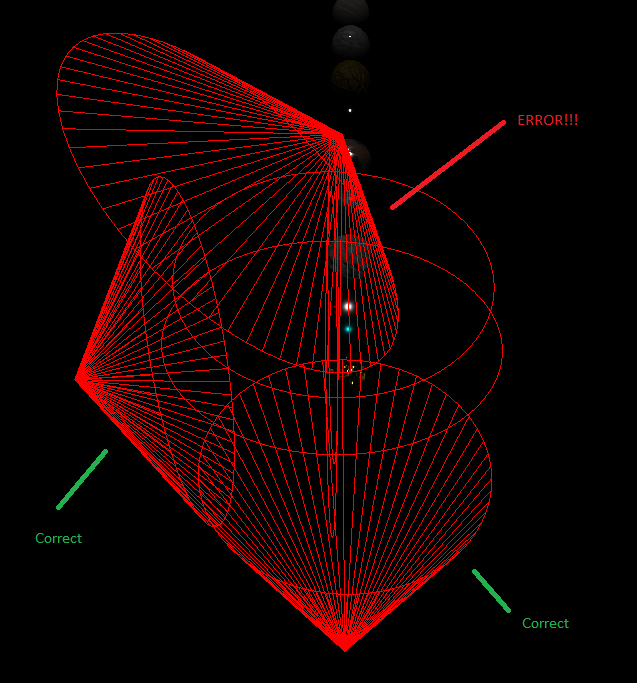
}Next step I'm creating three spot lights like this which represents 3 rotations around each axis:
this.spotLights.add(new CSpotLight(
new Color(1f, 0f, 0f, 1f), //Color
new Vector3(0f, 0f, 5000f), //Position
1f, //Intensity
new Vector3(0f, 0f, -1f), //Direction
15f, //Inner angle
30f, //Outer angle
4000f, //Radius
1f)); //Attenuation
this.spotLights.add(new CSpotLight(
new Color(1f, 0f, 0f, 1f),
new Vector3(0f, 5000f, 0f),
1f,
new Vector3(0f, -1f, 0f),
15f,
30f,
4000f,
1f));
this.spotLights.add(new CSpotLight(
new Color(1f, 0f, 0f, 1f),
new Vector3(5000f, 0f, 0f),
1f,
new Vector3(-1f, 0f, 0f),
15f,
30f,
4000f,
1f));And then I'm calculating quaternion for each spot light to create rotation matrix for model matrix (just for vertex shader purpose):
private static Quaternion quaternionLookRotation(Vector3 direction, Vector3 up)
{
Vector3 vector = Pools.obtain(Vector3.class).set(direction).nor();
Vector3 vector2 = Pools.obtain(Vector3.class).set(up).crs(vector).nor();
Vector3 vector3 = Pools.obtain(Vector3.class).set(vector).crs(vector2);
float m00 = vector2.x;
float m01 = vector2.y;
float m02 = vector2.z;
float m10 = vector3.x;
float m11 = vector3.y;
float m12 = vector3.z;
float m20 = vector.x;
float m21 = vector.y;
float m22 = vector.z;
Pools.free(vector);
Pools.free(vector2);
Pools.free(vector3);
float num8 = (m00 + m11) + m22;
Quaternion quaternion = Pools.obtain(Quaternion.class);
if (num8 > 0f)
{
float num = (float) Math.sqrt(num8 + 1f);
quaternion.w = num * 0.5f;
num = 0.5f / num;
quaternion.x = (m12 - m21) * num;
quaternion.y = (m20 - m02) * num;
quaternion.z = (m01 - m10) * num;
return quaternion;
}
if ((m00 >= m11) && (m00 >= m22))
{
float num7 = (float) Math.sqrt(((1f + m00) - m11) - m22);
float num4 = 0.5f / num7;
quaternion.x = 0.5f * num7;
quaternion.y = (m01 + m10) * num4;
quaternion.z = (m02 + m20) * num4;
quaternion.w = (m12 - m21) * num4;
return quaternion;
}
if (m11 > m22)
{
float num6 = (float) Math.sqrt(((1f + m11) - m00) - m22);
float num3 = 0.5f / num6;
quaternion.x = (m10+ m01) * num3;
quaternion.y = 0.5f * num6;
quaternion.z = (m21 + m12) * num3;
quaternion.w = (m20 - m02) * num3;
return quaternion;
}
float num5 = (float) Math.sqrt(((1f + m22) - m00) - m11);
float num2 = 0.5f / num5;
quaternion.x = (m20 + m02) * num2;
quaternion.y = (m21 + m12) * num2;
quaternion.z = 0.5f * num5;
quaternion.w = (m01 - m10) * num2;
return quaternion;
}
this.rotMatrix.set(quaternionLookRotation(
spotLight.getDirection(),
new Vector3(0, 1, 0)));Two rotations from three works perfectly. The problem appears only in the third rotation axis which should faced point (0, 0, 0):