
One of the problems was lack of precision. Here's the typical case that worked, running in my mockup:
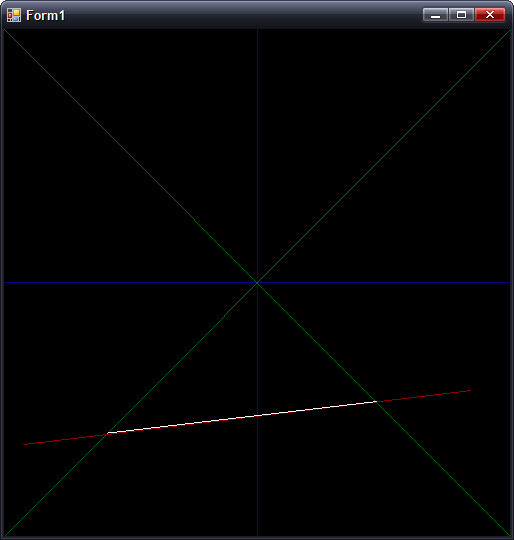
In this case, where |dX| > |dY|, all is good. However, switch that around so that |dY| > |dX|, and you get the following:
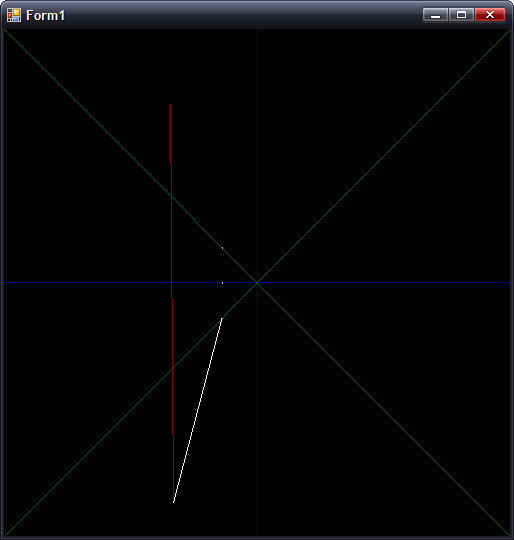
(Fixed point isn't so good for holding values that tend towards infinity). The solution is to have two branches for the clipping arithmetic, switching to the alternative form when |dY| > |dX|.
Preparation:
m = (Y1 - Y0) / (X0 - X1) ; m is negative gradient.
c = Y0 + m x X0 ; Not sure what to call this, but it's used in all the below calculations
Clipping to y = 0:
x = c / m
y = 0
Clipping to y = +x:
y = c / (1 + m)
x = +y ; not used as we can skip having to transform.
Clipping to y = -x:
y = c / (1 - m)
x = -y ; not used as we can skip having to transform.
The reason for clipping to y = 0 is to make sure the line is clipped to the correct side.
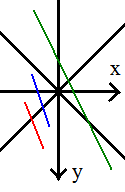
If you look at the red and blue lines, you can see that the far out-of-range points both have x < 0. This indicates that you should clip to y = -x. However, the green line also has the far end at x < 0, but we actually need to clip to y = +x. We can fix this problem by first clipping to y = 0, then checking the sign of x.
To fix the steep gradient problem, I just need to switch to these alternative sums:
First up, the gradient and c are calculated as:
m = (X0 - X1) / (Y1 - Y0) ; Flipped
c = X0 + m x Y0 ; Again, X/Y flipped.
For clipping to y = 0:
x = c ; No need to divide by m!
The only other difference is to make sure that when clipping y = -x:
y = c / (m - 1) ; as opposed to (1 - m)
...and all is hunky-dory.
The only remaining problem is if you are positioned directly inside a wall, which collision detection should fix.

next step solid walls? :D
seriously though I still wonder how you want to do that.
btw: is there some project you make this engine for, or are you doing it just for fun?