3 minutes ago, Fulcrum.013 said:(require to scale objects to convert ellipsoide to sphere, perform sphere test with scaled objects, and then scale results back)
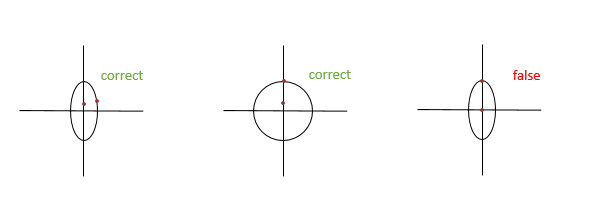
This is something i've always wondered about. It's not possible to calculate the closest distance to an ellipse from a point analytically so it needs some iterations. But if you scale both point and ellipsoid so ellipsoid becomes a circle, find closest point and unscale back, then the closest point is not really the closest one, leading to bad behavior especially if the ellipse is very flat.
So i guess iterations are necessary, turning ellipsoid into a more expensive primitive?
10 minutes ago, Fulcrum.013 said:so usualy it used into real-world robotics only (at least i never seen a game-intendent physic engines that support ellipsoids).
I don't think it's that uncommon. Newton a least supports non uniform scale for any body, including spheres or capsules.