
January 16, 2017
https://gamieon.itch.io/field-of-heroes
[media][/media]
After just over three months of working on it in my free time, I just released an online multiplayer socce…
December 31, 2016
Foreword: I'm developing an online soccer MOBA where upwards of ten players will be jockeying for a soccer ball. This journal is a brain dump to help me get a handle on the mechanics of managing a soccer ball in an online soccer game using Unity3D and the Photon network engine. I apologize in ad…
September 22, 2016
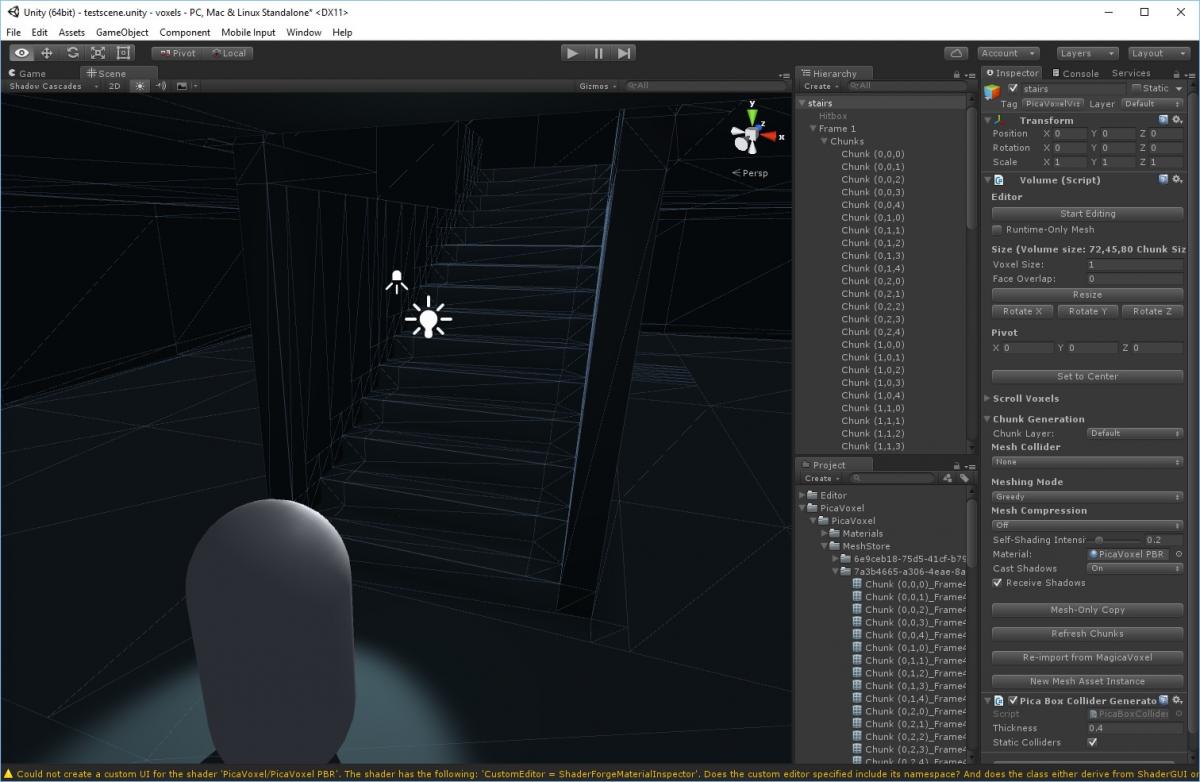
Recently I downloaded MagicaVoxel which lets you create and modify blocky objects, and bought PicaVoxel which lets you import them into Unity3D projects. The purpose was twofold: to help my friend Highsight develop his first game, and to have access to powerful tools in case I ever wanted to make a…
January 15, 2015
Though I've dabbled in game development since the late 1980's, it wasn't until October 26, 2004 that I incorporated Gamieon for fun, adventure, and maybe even a little profit. It's a part-time studio owned by myself and an investor who helps me cover expenses. Together we're the only employees of G…
December 09, 2014
[color=rgb(128,0,0)]The Issue[/color]
I'm developing an online soccer game for UE4 which you can get from http://github.com/Gamieon/UBattleSoccerPrototype for now. During game play, the soccer ball can be in one of two states: Freely moving; or in possession. When freely moving, the ball moves by ph…
I'm developing an online soccer game for UE4 which you can get from http://github.com/Gamieon/UBattleSoccerPrototype for now. During game play, the soccer ball can be in one of two states: Freely moving; or in possession. When freely moving, the ball moves by ph…
November 18, 2014
Yesterday my game started crashing out of the blue. The output window had content that resembled this snippet from https://answers.unrealengine.com/questions/132817/attachment-replication-crashes-client-in-451.html :
[ 79]LogOutputDevice:Warning: Script Stack:Actor.OnRep_AttachmentReplicationAsserti…
September 15, 2014
Though I'm still new to the Unreal Editor and behavior trees, I wanted to create a primitive soccer simulation for a game I'm prototyping. You can get the code in its current form at:
https://github.com/Gamieon/UBattleSoccerPrototype
[color=#b22222]Getting Started[/color]
The first part of my journey …
https://github.com/Gamieon/UBattleSoccerPrototype
[color=#b22222]Getting Started[/color]
The first part of my journey …
August 18, 2014

While in-between major projects that use the Unity game engine, I decided to give the Unreal Editor a spin to see what all the hype was about. For those of you who just want to see the cool stuff first, here's a video of my first playable Gauntlet-like dungeon crawl prototype finished in about twen…
July 07, 2014
The focus of this journal entry is on how I integrated In-App purchase capabilities into my Unity game. I'm not going to discuss strategies for earning money from players, or how I used the IAP assets once they were integrated.
[color=#b22222]Unity Setup for Zaubersee[/color]
I began by purchasing a …
[color=#b22222]Unity Setup for Zaubersee[/color]
I began by purchasing a …
July 02, 2014
In one effort to monetize Hamster Chase, I wanted to have ads appear in it. It took me a while to decide where to put the ads; the articles at https://inneractive.jira.com/wiki/display/DevWiki/Ad+Placement+Strategy and http://streetfightmag.com/2012/12/14/can-mobile-advertising-be-made-less-annoyin…
June 30, 2014
I wanted to add Facebook integration to Hamster Chase for Windows Phone 8 in an effort to have players get word out of the game through social media in exchange for a reward.
A search on Google led me to Chillster's Facebook SDK at http://forum.unity3d.com/threads/facebook-sdk-for-unity-plus-window…
A search on Google led me to Chillster's Facebook SDK at http://forum.unity3d.com/threads/facebook-sdk-for-unity-plus-window…
June 25, 2014
In a previous journal entry I described my experiences converting my Unity iOS/Android app to Windows Phone 8. Here I continue on about my experiences with combating app slowness as well as setting app properties from the generated VS 2013 project.
[color=#a52a2a]Transparency Performance Issues Reso…
[color=#a52a2a]Transparency Performance Issues Reso…
June 01, 2014

A couple weeks ago, a friend tipped me off to a free Microsoft Unity workshop that was held in Orlando, FL. Though reluctant at first, I decided to go. I needed to get out of my lone wolf developer cave, meet other folk, and see what Microsoft could do to help me port my mobile games to Windows Pho…
May 06, 2014
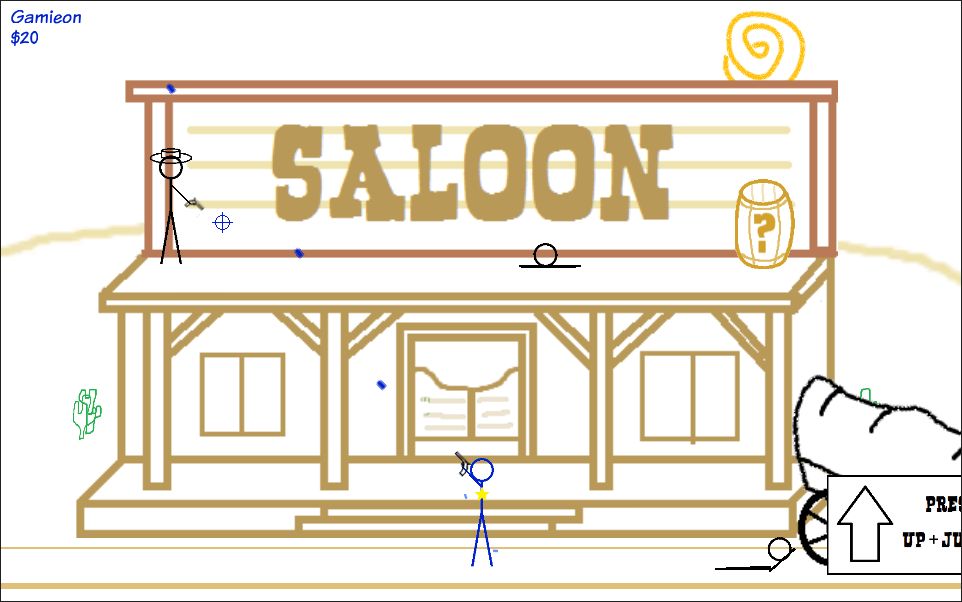
I finally got Paper Cowboys to a playable alpha state. I originally wanted to wait until it was much more polished; but I decided this was a good way to find people interested in helping me finish the game through constructive feedback, help with PR and play testing. And besides, if something is pl…
April 17, 2014
Updates have been few and very far between; mainly because most of the work I've done doesn't directly result in new stuff to show everyone. I'm over that part now, and papa's got a brand new bag!
Special Weapons
Special weapons get spawned at random when players shoot barrels. If you're one of those…
Special Weapons
Special weapons get spawned at random when players shoot barrels. If you're one of those…
February 24, 2014
In December 2013 I entered into a small "venture" with the Skillz team to make a simple game called Tiltz Tournament where players could compete for game coins or real money. I developed the core game, and they provided the tools for matchmaking and account management. Here I write about my experie…
February 22, 2014
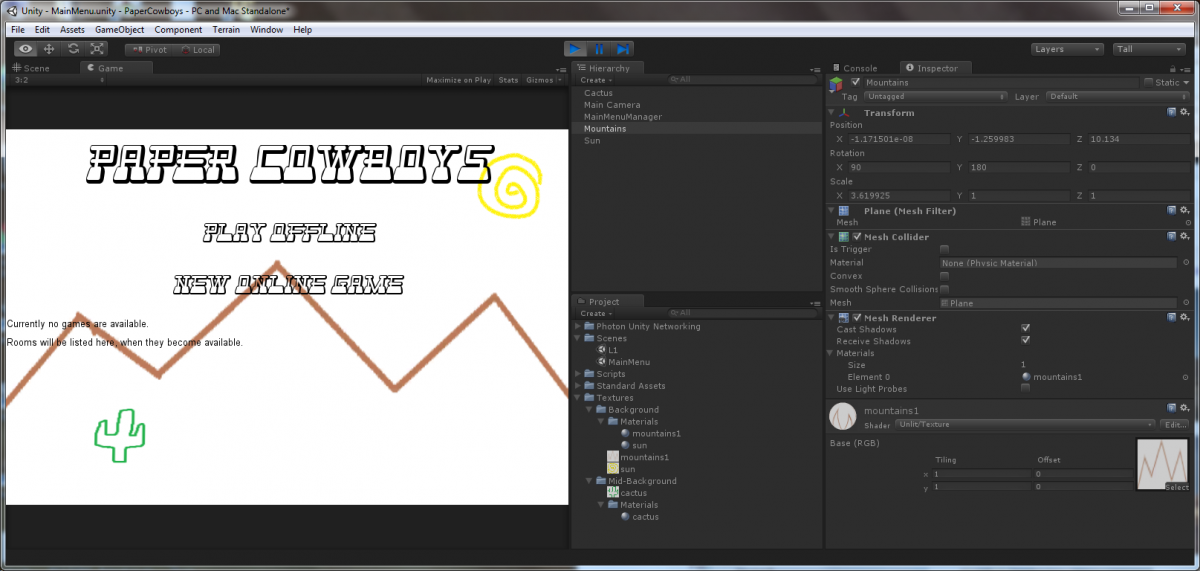
It's been a while since my previous update, but I finally have some content to show off for the new level 1 in Paper Cowboys full! The reasons it took me so long:
- Procrastination: I simply didn't have that creative spirit and motivation. I've been rather busy at my full time work and exercising late…
January 31, 2014
I'd like to release Paper Cowboys for the PC, Mac, Linux, and for at least one console. It therefore only makes sense to plan ahead for having multiple players controlled by the same running instance of the game. Even without a console release, the idea of friends sitting around the computer with g…
January 18, 2014
Now that the intro and main menu concepts are done, I'm moving on to changing the networking model closer to authoritative server.
The goal is to minimize the chance for major conflicting game states (such as an explosion only happening on some clients) and to make speed and money hacks a little har…
The goal is to minimize the chance for major conflicting game states (such as an explosion only happening on some clients) and to make speed and money hacks a little har…
January 10, 2014
It is my hope to release Paper Cowboys as a multi-player (both local and online) side scroller for the PC and console platforms in the summer of 2014. A "48 hour build" is already available on GameJolt, and the final release will have more great content, a storyline, and polish.
[media][/media]
A cou…
[media][/media]
A cou…
November 30, 2013
Apologies for the terribly boring journal entry thumbnail image. Anyway...
With every new project I try to make better tools to carry into my future projects. One of them has to do with the local game configuration and PlayerPrefs. There are two issues I have with PlayerPrefs:
With every new project I try to make better tools to carry into my future projects. One of them has to do with the local game configuration and PlayerPrefs. There are two issues I have with PlayerPrefs:
- Using PlayerPrefs.Get..…
October 04, 2013
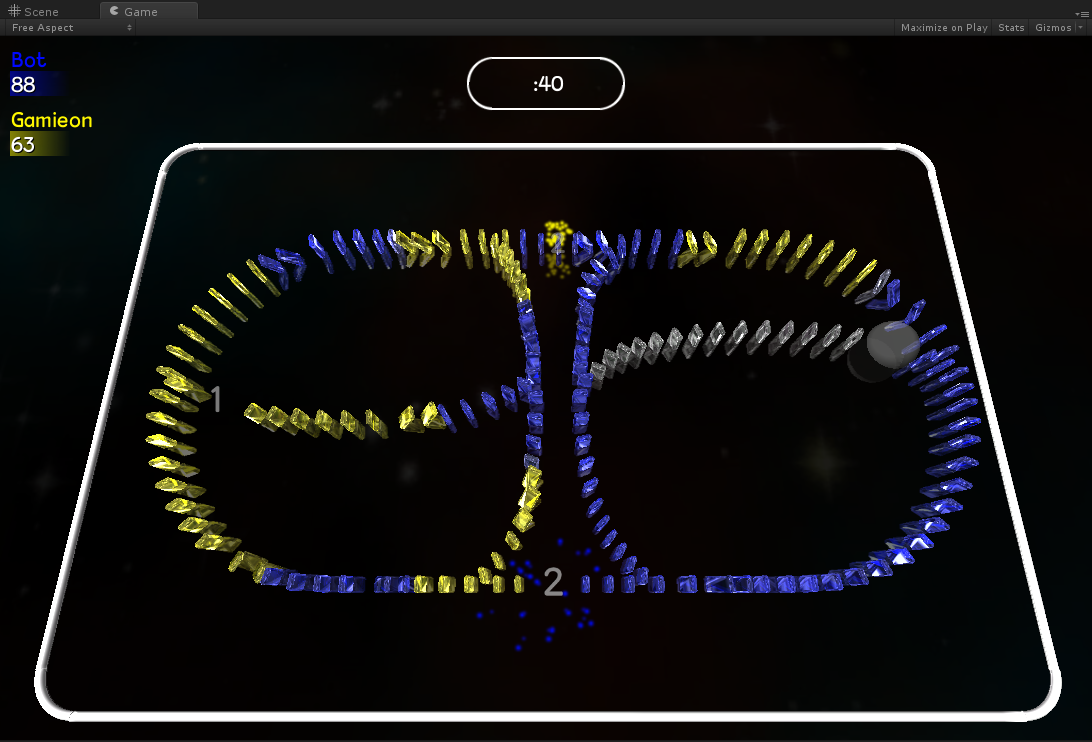
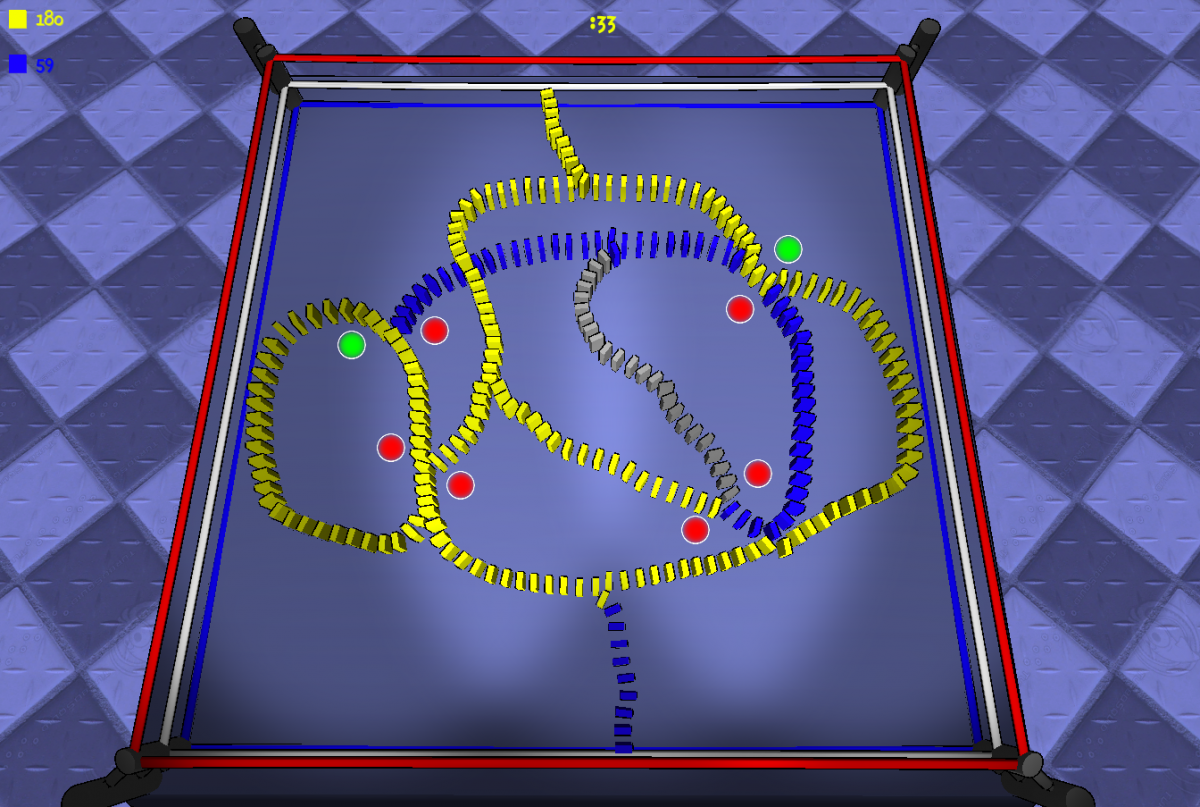
In case this is your first time being exposed to the project: Domino Arena is a multi-player "party" game where you try to paint a playfield full of dominoes with your player's color, and prevent other players from doing the same. At the start of the game, one domino for every player is assigned th…
September 20, 2013
September 13, 2013
I promised myself I would not do any more large projects without working in teams, but I never said anything about small ones. Even with the small ones however, I'm stuck with the same problem I have with all projects: I'm not that great at creative and artistic direction.
Consider my latest project…
Consider my latest project…
August 24, 2013
One of my ad-supported mobile games has been on the market for the better part of a year, and I'm in the process of removing ads and putting in microtransactions to see if they will bring in more income. I'm a neophyte when it comes to designing apps around monetization; and while studying a few AA…
June 13, 2013

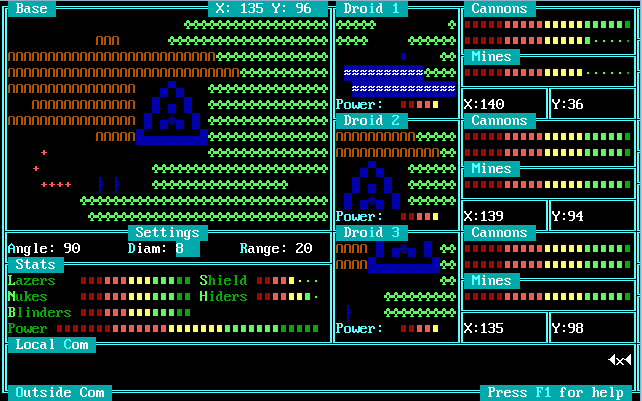
I've spent the past decade developing games in my spare time (which I don't have much of) with unique game play that aren't side-scrollers, first-person shooters, RPG's, MMO's; and aren't even multi-player. Recently I felt the urge to just break out from trying to make not-done-to-death games and m…
June 08, 2013
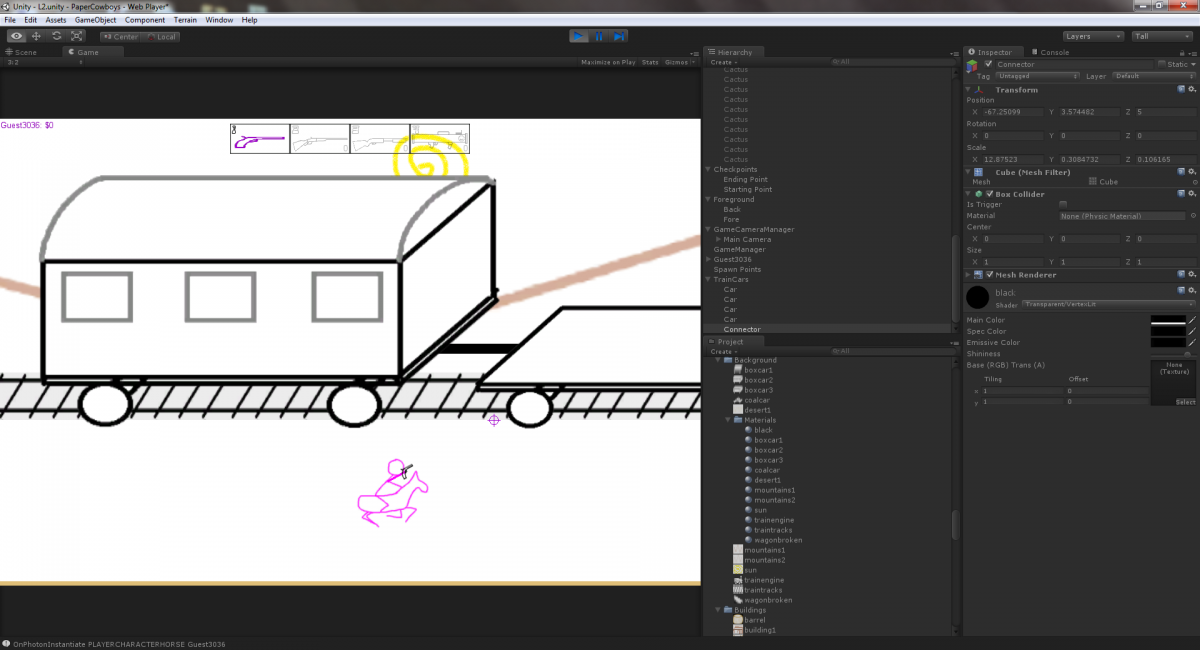
Hour 37
Made some good progress on level 2: After studying some images on Google, I drew three box cars, a coal car, the engine and some tracks. Then I used them to begin building the train for level two. The next step is to get the enemies properly spawning on each kind of car, repeat some of the c…
Made some good progress on level 2: After studying some images on Google, I drew three box cars, a coal car, the engine and some tracks. Then I used them to begin building the train for level two. The next step is to get the enemies properly spawning on each kind of car, repeat some of the c…
May 31, 2013
May 23, 2013
I've spent many years developing games in my spare time (which I don't have much of) with unique game play that aren't side-scrollers, first-person shooters, RPG's, MMO's; and aren't even multi-player. Recently I've been feeling the urge to just stop doing things that way, and just make a good old …
May 18, 2013
In 2012 I had the pleasure to work with Meta3D Studios in developing artwork for my mobile game "Hamster Puzzler," and I'd like to share some tips on getting the most out of working with an art studio.
Here's the short version: An employed studio is an extension of your core team, so treat them with…
Here's the short version: An employed studio is an extension of your core team, so treat them with…
Advertisement
Popular Blogs





{kind=link}
{kind=link}
Advertisement