I think I finally get it.
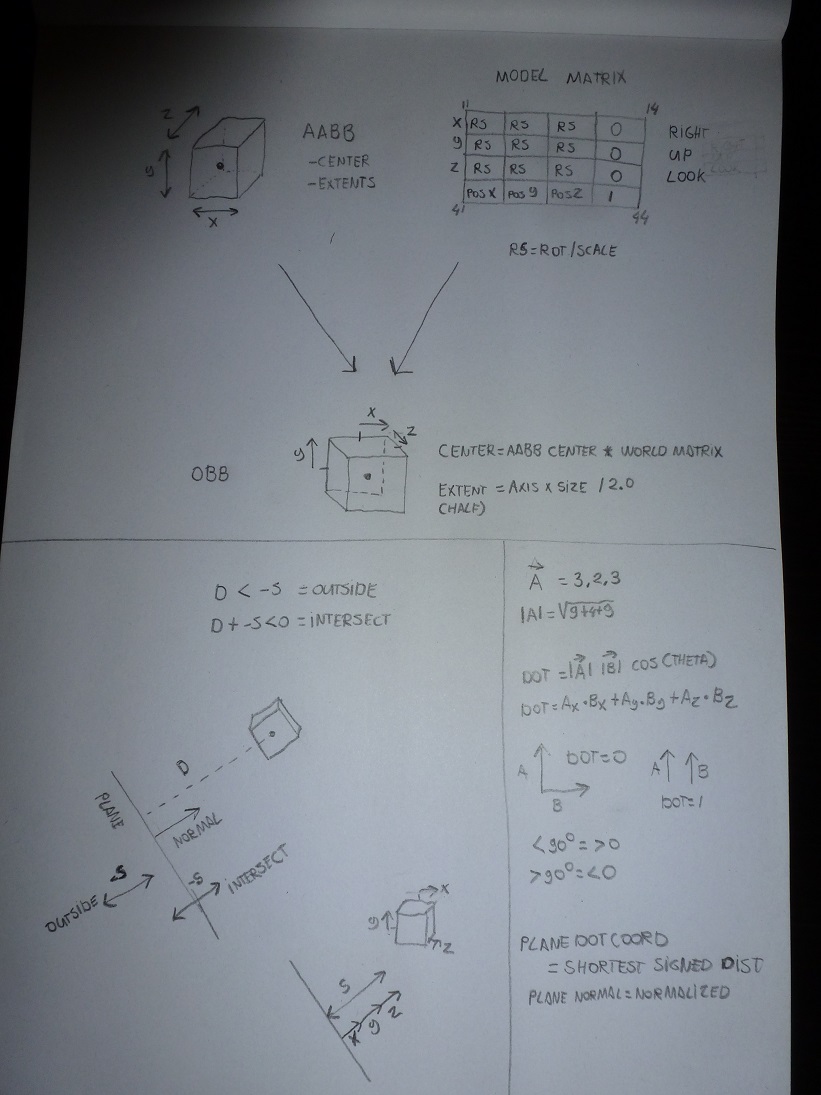
Drawing/ working out an example case without rotation, so X axis is 1,0,0 etc. clears things up and makes me able to visiualize it. Conclusion: from any combination of the 3 resulting extents, in worldspace (not translated/ moved, though orientated in world space), I can find the 8 corners, which I also do to derive the worldspace AABB like you said.
Adding up the fabs magnitudes/ lengths of the extents projected to the plane normal, basically makes me 'travel' along the OBB's axis's to reach the farthest vertex/ point/ corner. Which I can interpret as the projected radius and compare to the distance from OBB center to plane.
Is this correct?
worldspace or not, matrix & extents


Author
Cool, thanks again for all the help.
Gonna need to know this theory for sure when I add OBB collisions later on.
Gonna need to know this theory for sure when I add OBB collisions later on.
Yes obb/obb collisions use the same idea, but rather then testing the plane normal(which is the only direction a box can overlap a plane), you have to test against all the possible axii of separation.
")
This topic is closed to new replies.
Advertisement
Popular Topics

Advertisement

